Modellbasierter Systementwurf
Beim Modellbasierten Systementwurf werden grafische Modelle verwendet, die das Systemverhalten beschreiben. Im Idealfall können die Modellierungswerkzeuge aus den Modellen Code für eine textuelle Programmiersprache erstellen (in der Regel C) und dieser kann dann in Maschinensprache übersetzt werden, um das modellierte Verhalten direkt auf der Zielarchitektur auszuführen.
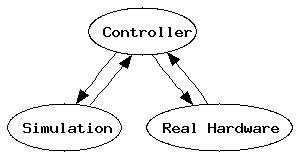
Um die modellierte Steuerung für ein bestimmtes system under development (SUD) nicht direkt an der entsprechenden Hardware debuggen zu müssen, ist es sinnvoll, zusätzlich eine Simulation des Verhaltens der Umgebung des Systems zu modellieren und zunächst das SUD Modell zusammen mit dieser Simulation zu entwickeln und zu debuggen. Wenn die Simulation genau genug ist, kann im Optimalfall ein fehlerfreies Programm in das physikalische System eingebracht werden.
Da die Modellbahnanlage ein verteiltes System ist, muss bei der Modellierung die Kommunikation zwischen den einzelnen Knoten berücksichtigt werden. Im ersten Anlauf verwenden wir folgende kommerzielle Produkte:
- Simulink für Datenfluss (Mathworks)
- Stateflow für Kontrollfluss (Mathworks)
- Das Simulink AddOn Matlink der Firma TTTech zur Modellierung der Kommunikation über das Time-Triggered Protocol
Die entstehenden Modelle legen das Verhalten auf allen Ebenen fest, beginnend bei der Ansteuerung der Peripherie über die Kommunikation der Knoten bis hin zur Zugsteuerung. Den kleinsten Baustein bildet ein Block, der die Kommunikation zwischen einem TTP Powernode und den drei angeschlossenen Leistungselektroniken repräsentiert. Er wurde zusammen mit der übergeordneten Funktionalität im Rahmen des Fortgeschrittenenpraktikums im Wintersemester 2005/2006 von den Studenten selbst entwickelt. Dieses Kapitel beschreibt die Funktion des Blocks basierend auf der Dokumentation aus dem Praktikum.
